一、引言
車載雷達(dá)系統(tǒng),特別是用于精密探測、遙感測繪、軍事偵察等領(lǐng)域的高性能雷達(dá),其工作性能與精度在很大程度上取決于雷達(dá)天線的姿態(tài)。天線基座的水平度是影響波束指向準(zhǔn)確性和數(shù)據(jù)質(zhì)量的關(guān)鍵因素。在復(fù)雜多變的野外地形或機(jī)動部署場景下,車輛平臺難以始終保持理想水平。因此,一套高效、可靠、自動化的調(diào)平系統(tǒng)至關(guān)重要。機(jī)電式自動調(diào)平系統(tǒng),以其結(jié)構(gòu)相對簡單、響應(yīng)速度快、控制精度高、環(huán)境適應(yīng)性強(qiáng)等優(yōu)點(diǎn),成為車載雷達(dá)平臺的主流解決方案。
二、系統(tǒng)總體方案設(shè)計(jì)
本方案旨在設(shè)計(jì)一套基于機(jī)電控制技術(shù)的車載雷達(dá)平臺全自動調(diào)平系統(tǒng)。其核心目標(biāo)是:在車輛駐停后,系統(tǒng)能自動、快速、高精度地將雷達(dá)載車平臺調(diào)整至水平狀態(tài)(通常要求水平誤差在若干角分以內(nèi)),并在后續(xù)工作中保持該狀態(tài),或在受外力干擾產(chǎn)生微小傾斜時(shí)進(jìn)行動態(tài)補(bǔ)償。
系統(tǒng)組成架構(gòu):
- 水平傳感單元: 作為系統(tǒng)的“眼睛”,負(fù)責(zé)實(shí)時(shí)監(jiān)測平臺的水平姿態(tài)。通常采用高精度雙軸傾角傳感器(如電解液式、MEMS式),測量平臺繞X軸(橫滾)和Y軸(俯仰)的傾斜角度,并將模擬或數(shù)字信號傳輸給控制核心。
- 控制核心單元: 作為系統(tǒng)的“大腦”,通常由微控制器(MCU)或可編程邏輯控制器(PLC)構(gòu)成。它接收傳感器的實(shí)時(shí)數(shù)據(jù),運(yùn)行調(diào)平控制算法(如PID控制),計(jì)算出各支撐腿所需的調(diào)整量和方向,并生成相應(yīng)的控制指令,驅(qū)動執(zhí)行機(jī)構(gòu)動作。
- 機(jī)電執(zhí)行機(jī)構(gòu): 作為系統(tǒng)的“手腳”,負(fù)責(zé)執(zhí)行具體的調(diào)平動作。本方案采用機(jī)電式支腿,通常由以下部件構(gòu)成:
- 驅(qū)動電機(jī): 采用直流伺服電機(jī)或步進(jìn)電機(jī),提供旋轉(zhuǎn)動力。
- 減速與傳動機(jī)構(gòu): 將電機(jī)的高速旋轉(zhuǎn)轉(zhuǎn)換為低速、大扭矩的輸出,并可能將旋轉(zhuǎn)運(yùn)動轉(zhuǎn)換為直線運(yùn)動。常用蝸輪蝸桿減速器或行星齒輪減速器,兼具減速和自鎖功能,確保調(diào)平后支腿位置鎖定。
- 機(jī)械支腿: 通常為絲杠螺母機(jī)構(gòu),將傳動機(jī)構(gòu)的旋轉(zhuǎn)運(yùn)動轉(zhuǎn)化為支腿的直線伸縮運(yùn)動,直接頂升或下降車體相應(yīng)角落。
- 人機(jī)交互與電源單元:
- 操作面板/顯示器: 提供系統(tǒng)狀態(tài)(如水平角度、支腿行程、故障代碼)顯示,以及手動/自動模式切換、啟動、急停等操作接口。
- 動力電源與驅(qū)動電路: 為整個(gè)系統(tǒng)(特別是驅(qū)動電機(jī))提供穩(wěn)定可靠的電力供應(yīng),包括電機(jī)驅(qū)動模塊(如H橋驅(qū)動器)。
三、機(jī)電控制系統(tǒng)核心設(shè)計(jì)
- 控制策略與算法:
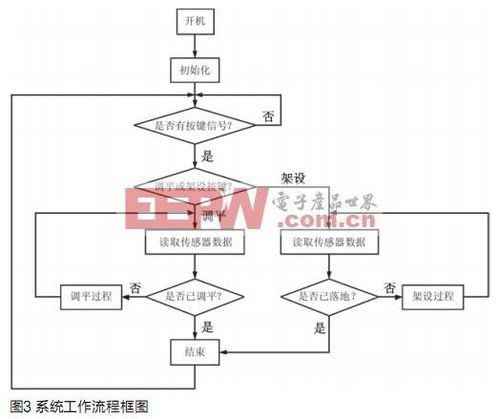
- 調(diào)平邏輯: 系統(tǒng)上電自檢后,操作員啟動自動調(diào)平流程。控制器讀取傳感器初始傾角,判斷傾斜方向與幅度。采用“追高法”或“四點(diǎn)協(xié)調(diào)法”等策略,優(yōu)先調(diào)整傾斜角度最大的方向,或協(xié)調(diào)控制四個(gè)支腿按預(yù)定順序和速度動作,避免車體結(jié)構(gòu)承受過大扭力。
- 控制算法: 采用經(jīng)典的PID(比例-積分-微分)控制算法。控制器根據(jù)目標(biāo)水平值(零位)與傳感器反饋的實(shí)際值之間的偏差(e),計(jì)算出對電機(jī)的控制量(如PWM占空比)。PID參數(shù)(Kp, Ki, Kd)需根據(jù)具體機(jī)械系統(tǒng)進(jìn)行整定,以實(shí)現(xiàn)快速響應(yīng)、超調(diào)量小、最終靜態(tài)精度高的效果。
- 安全與容錯(cuò)機(jī)制: 算法中需集成支腿極限位置保護(hù)(限位開關(guān))、電機(jī)過流保護(hù)、調(diào)平超時(shí)保護(hù)、傳感器失效檢測等,確保系統(tǒng)安全。
- 關(guān)鍵機(jī)電部件選型與設(shè)計(jì):
- 傾角傳感器: 選擇測量范圍、分辨率(通常需達(dá)到0.001°)、響應(yīng)頻率和環(huán)境適應(yīng)性滿足要求的型號。
- 電機(jī)與驅(qū)動器: 根據(jù)支腿的最大負(fù)載(車重與設(shè)備重量分配)、所需伸縮速度、系統(tǒng)電壓等計(jì)算所需電機(jī)的扭矩和功率,選用帶編碼器反饋的電機(jī)可實(shí)現(xiàn)更精確的位置閉環(huán)控制。驅(qū)動器需能提供足夠的輸出電流并具備良好的散熱和保護(hù)功能。
- 機(jī)械傳動設(shè)計(jì): 蝸輪蝸桿機(jī)構(gòu)因其大減速比和反向自鎖特性而被廣泛采用,能確保電機(jī)斷電后支腿位置保持不變。絲杠需有足夠的剛度和行程,并考慮防塵密封。
- 系統(tǒng)工作流程:
- 部署與啟動: 車輛駛?cè)腩A(yù)定陣地,制動駐停。操作員通過面板啟動自動調(diào)平系統(tǒng)。
- 狀態(tài)檢測: 控制系統(tǒng)進(jìn)行自檢(傳感器、支腿限位、電路通訊)。
- 粗調(diào)平: 控制器根據(jù)初始傾角,快速驅(qū)動四個(gè)支腿伸出接觸地面直至承重(可能通過壓力傳感器或電機(jī)電流突變判斷),將平臺初步抬離車橋,消除輪胎懸架的影響。
- 精調(diào)平: 進(jìn)入高精度PID調(diào)節(jié)階段。控制器持續(xù)比較實(shí)時(shí)傾角與目標(biāo)值,微調(diào)各支腿伸縮量,逐步減小水平誤差,直至進(jìn)入預(yù)設(shè)的精度容差范圍內(nèi)(如±0.05°)。
- 鎖定與完成: 達(dá)到水平后,控制器停止電機(jī),依靠傳動機(jī)構(gòu)的自鎖特性保持位置。面板顯示“調(diào)平完成”,系統(tǒng)進(jìn)入監(jiān)測狀態(tài)。在工作過程中,系統(tǒng)可設(shè)定為持續(xù)監(jiān)測模式,若因地面沉降或外力導(dǎo)致水平度超差,可自動啟動微調(diào)。
- 撤收: 任務(wù)結(jié)束后,控制所有支腿同步收縮回位,車輛恢復(fù)機(jī)動狀態(tài)。
四、方案優(yōu)勢與關(guān)鍵技術(shù)點(diǎn)
- 優(yōu)勢:
- 自動化程度高: 全過程無需人工干預(yù),調(diào)平速度快,效率高。
- 精度高、穩(wěn)定性好: 閉環(huán)控制結(jié)合高精度傳感器,能達(dá)到很高的調(diào)平精度;機(jī)械自鎖保證長期穩(wěn)定性。
- 環(huán)境適應(yīng)性強(qiáng): 機(jī)電系統(tǒng)對電磁環(huán)境相對不敏感,可靠性高,適于野外惡劣環(huán)境。
- 承載能力強(qiáng): 機(jī)械結(jié)構(gòu)堅(jiān)固,可支撐重型雷達(dá)設(shè)備。
- 關(guān)鍵技術(shù)點(diǎn):
- 多支腿協(xié)調(diào)控制算法: 避免“虛腿”和結(jié)構(gòu)應(yīng)力集中。
- 系統(tǒng)建模與PID參數(shù)整定: 實(shí)現(xiàn)動態(tài)性能最優(yōu)化。
- 機(jī)電接口可靠性設(shè)計(jì): 包括機(jī)械防抖動、電氣抗干擾、連接件防松等。
- 輕量化與集成化設(shè)計(jì): 在保證強(qiáng)度前提下減輕支腿系統(tǒng)重量,便于車載。
五、結(jié)論
本方案提出的車載雷達(dá)機(jī)電式自動調(diào)平系統(tǒng),通過高精度傾角傳感器、智能控制單元和高效機(jī)電執(zhí)行機(jī)構(gòu)的有機(jī)結(jié)合,形成了一個(gè)完整的閉環(huán)控制系統(tǒng)。它能夠有效克服地形不平帶來的影響,為車載雷達(dá)提供一個(gè)穩(wěn)定、精確的水平工作基座,從而保障雷達(dá)系統(tǒng)性能的充分發(fā)揮。該系統(tǒng)方案具有較高的可靠性、實(shí)用性和推廣價(jià)值,可廣泛應(yīng)用于各類需要快速精密調(diào)平的車載設(shè)備平臺。